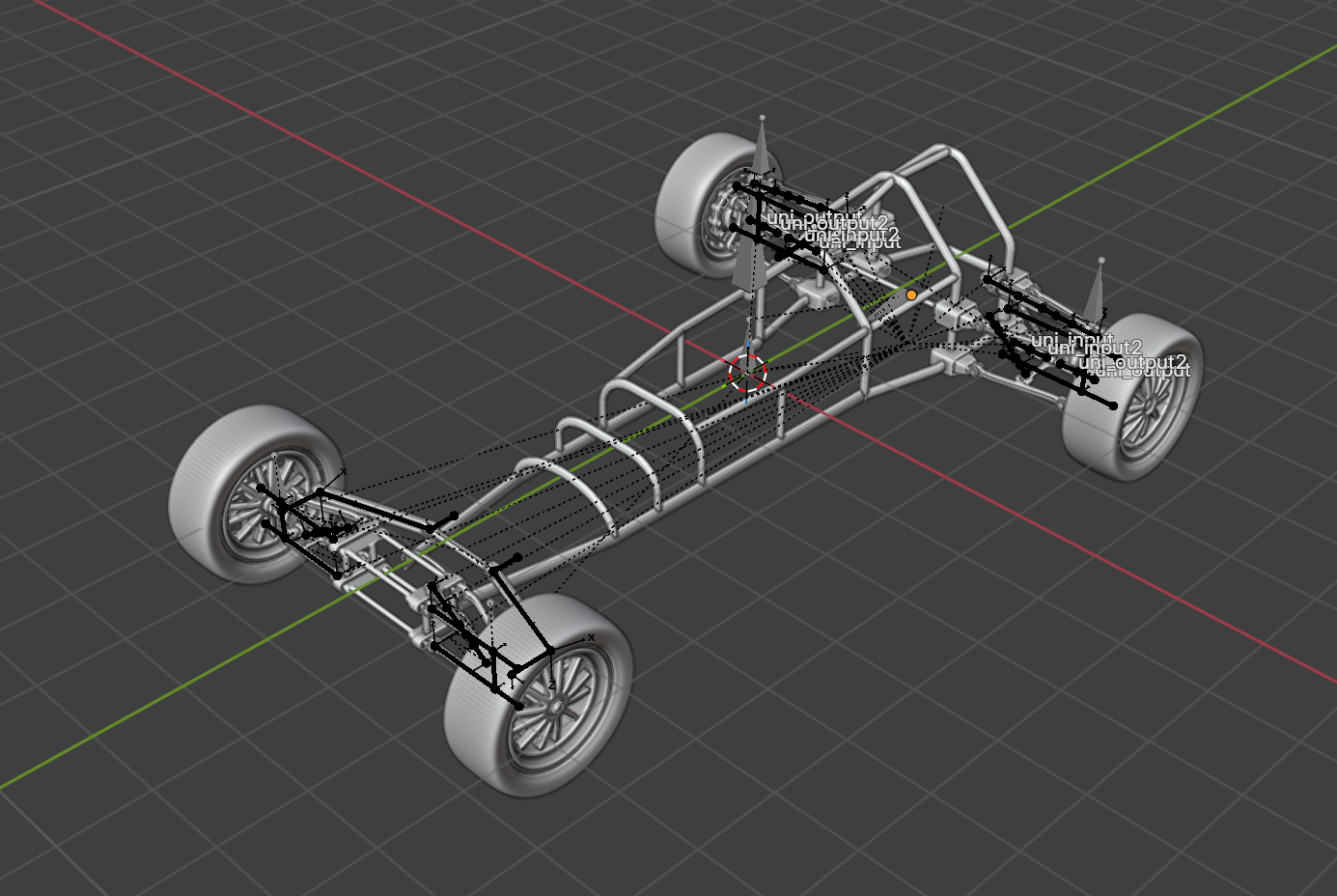
[블렌더] 자동차 서스펜션/스티어링 리깅
https://www.youtube.com/watch?v=d10kEwkCgmU
구현 기능
1.뒷바퀴 / 앞바퀴 수직 서스펜션
2.앞바퀴 스티어링
3.뒷바퀴 동력 축 유니버셜 조인트
4.Displace 평면 주행 시뮬레이션
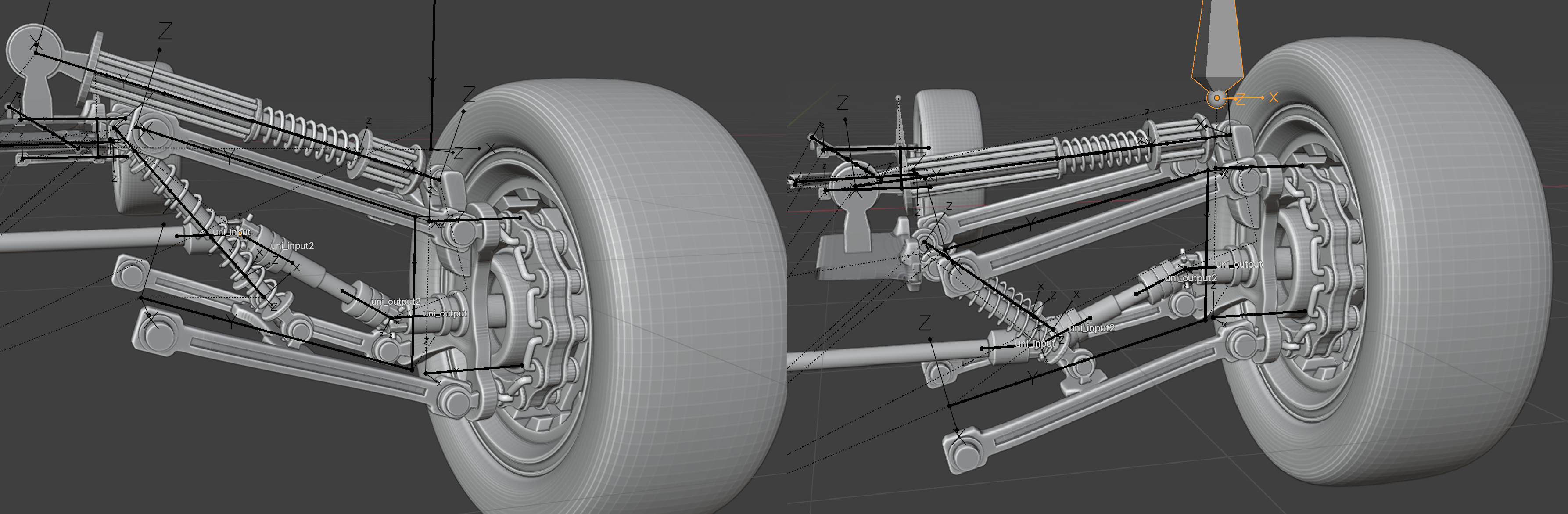
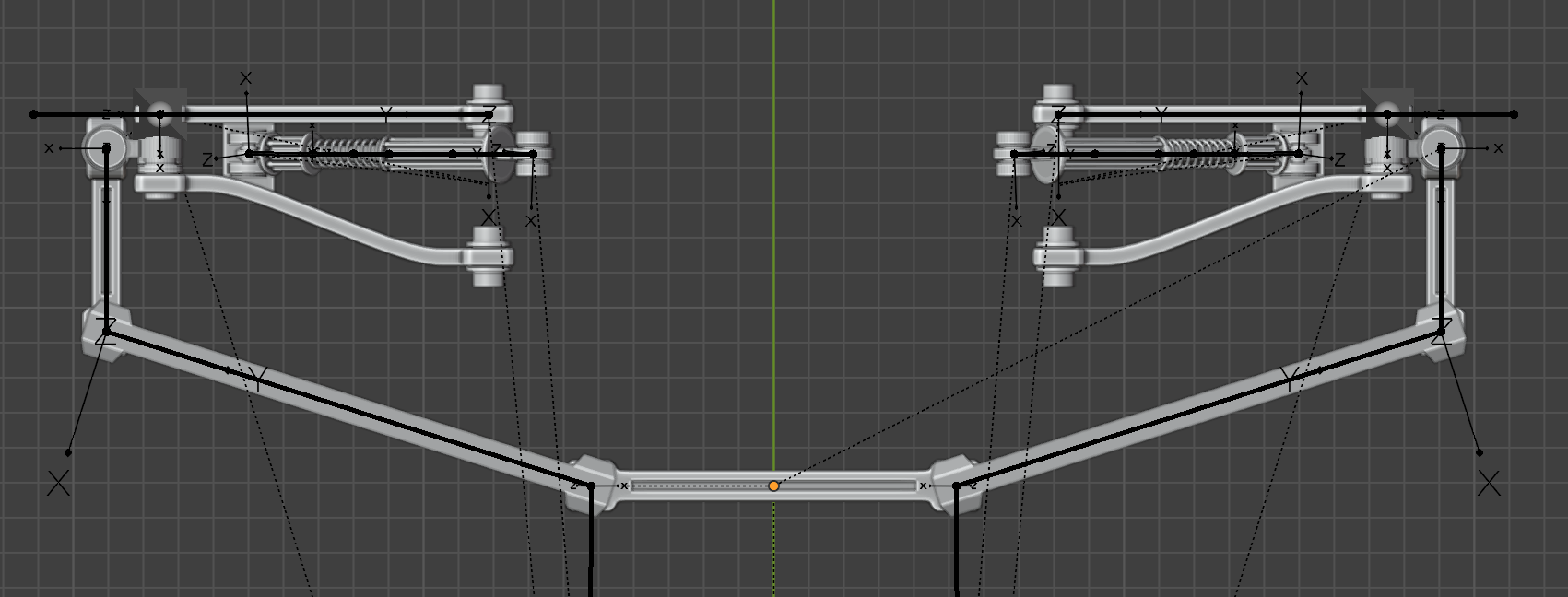
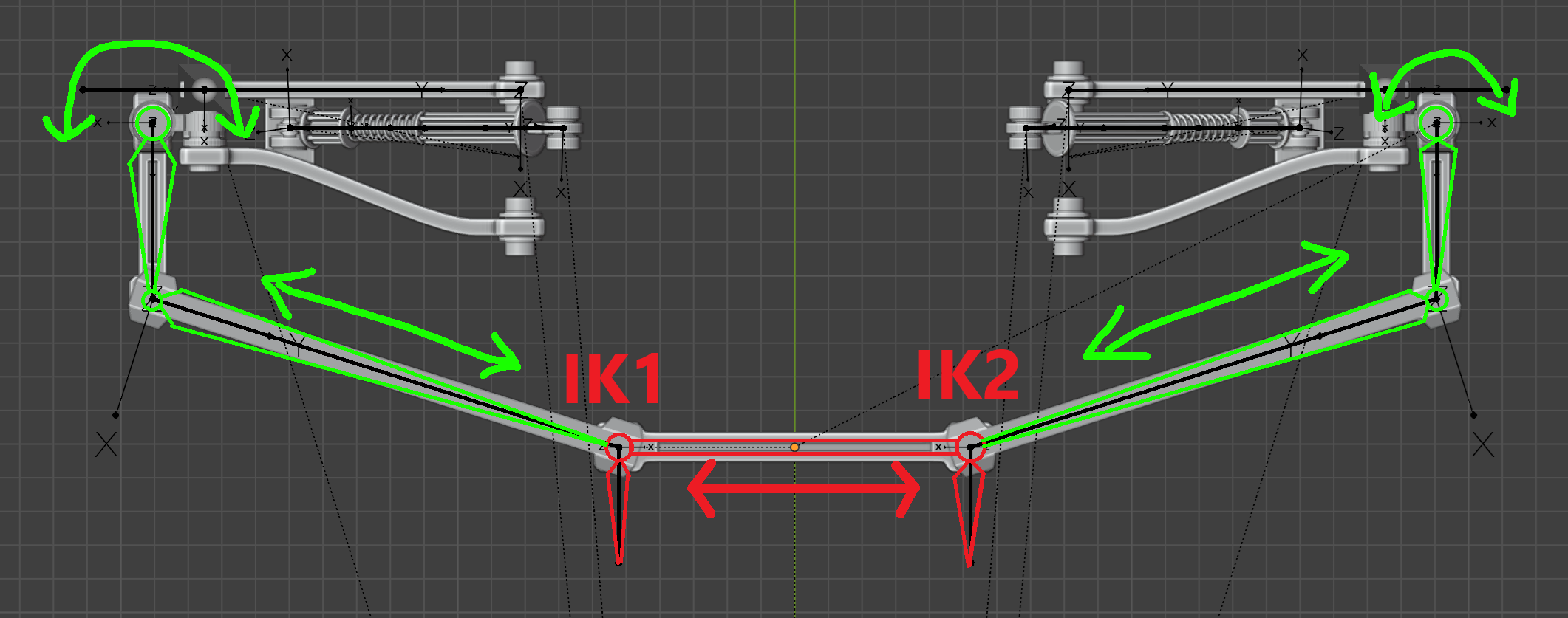
뒷바퀴 수직 서스펜션



두개의 IK체인을 ROOT로 한번에 조절하는 방식
-서스펜션이 위아래로 움직임에 따라 휠의 수평방향 움직임이 발생 >> IK의 수직움직임으로만은 불가능한 구조
-여기서는 BONE_003이 BONE_002의 tail을 damped track하는 방식으로 해결
-더 좋은 방식은 IK control bone들을 회전축(bone_001과 bone_002의 뿌리부분)에 limited distance를 거는 것
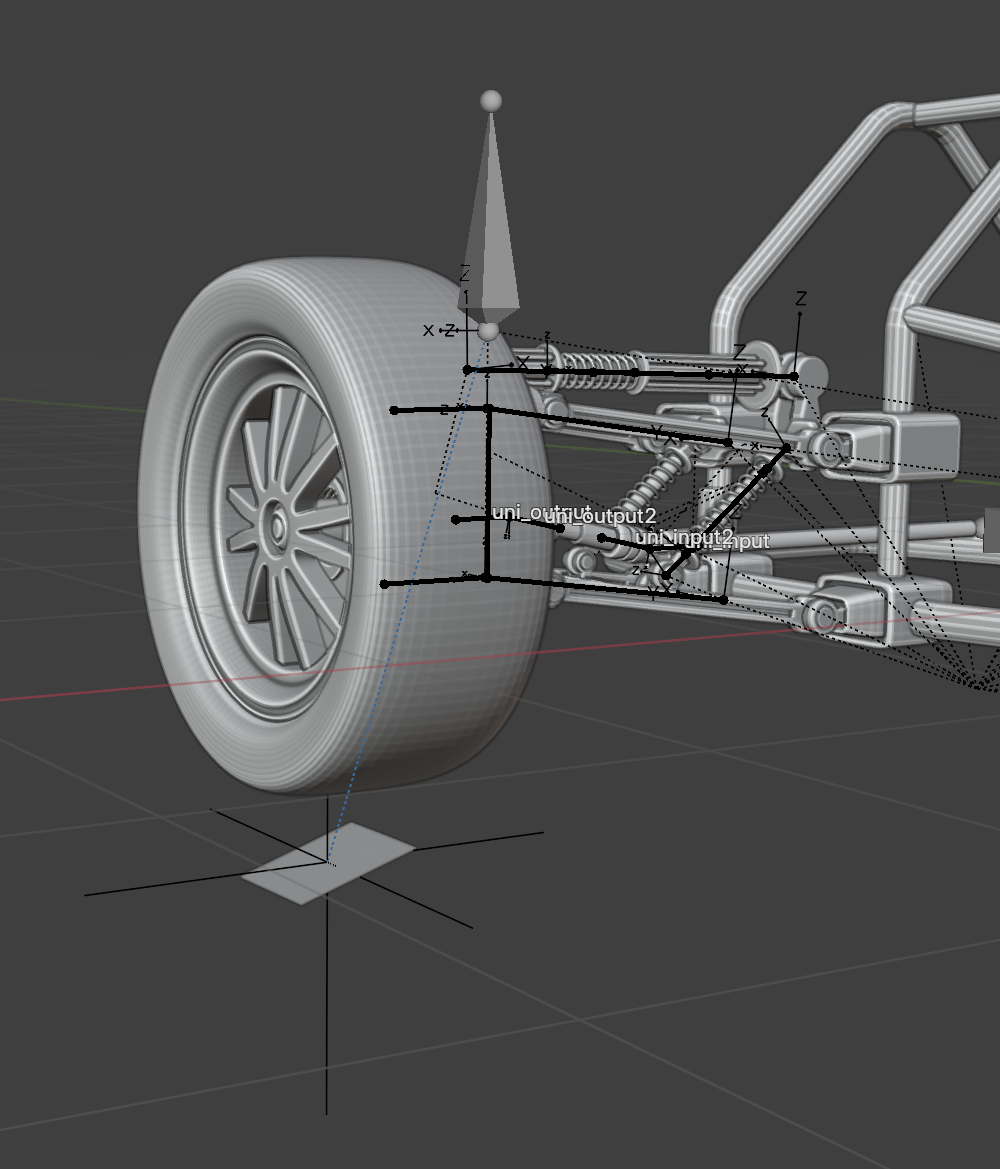
뒷바퀴 동력축 유니버셜 조인트
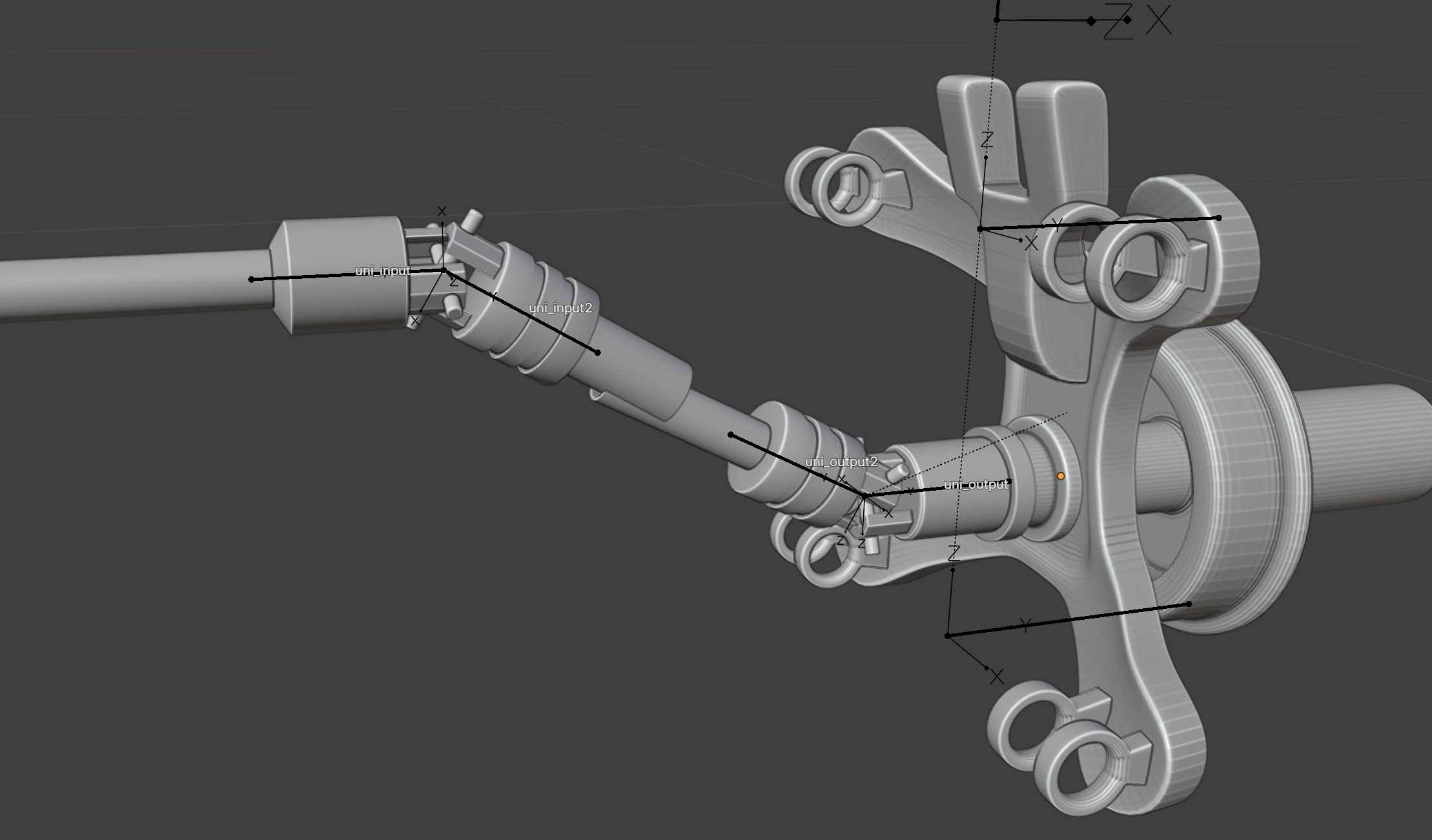

리깅 구조
Input과 Output Bone의 회전은 서로 링크되어있음
외부의 control bone의 회전 >> Input의 회전 >> output의 회전으로 연계
Link_1과 Link_2 bone은 각각 input과 output bone에 parent되어있고, 서로 Damped Track하는 구조
Link_1과 Link_2 bone의 회전은 input에 링크
스프링 리깅
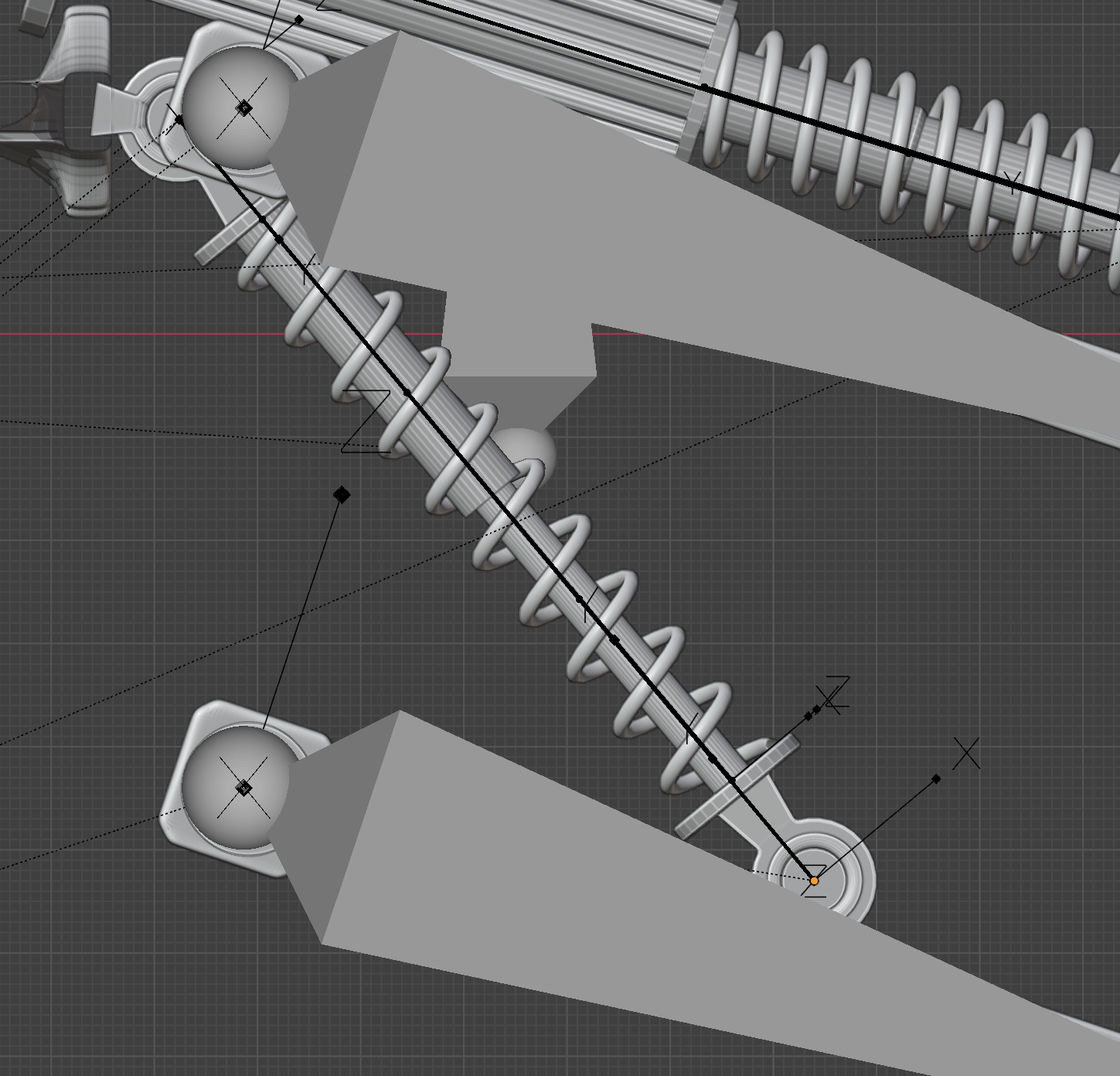

3개의 BONE 이용
2개의 ROOT는 서로 damped track으로 마주보도록 설정
사이에 Stretch용 bone을 넣어서 스프링 메쉬를 이 bone에 parent
앞바퀴 서스펜션 / 스티어링

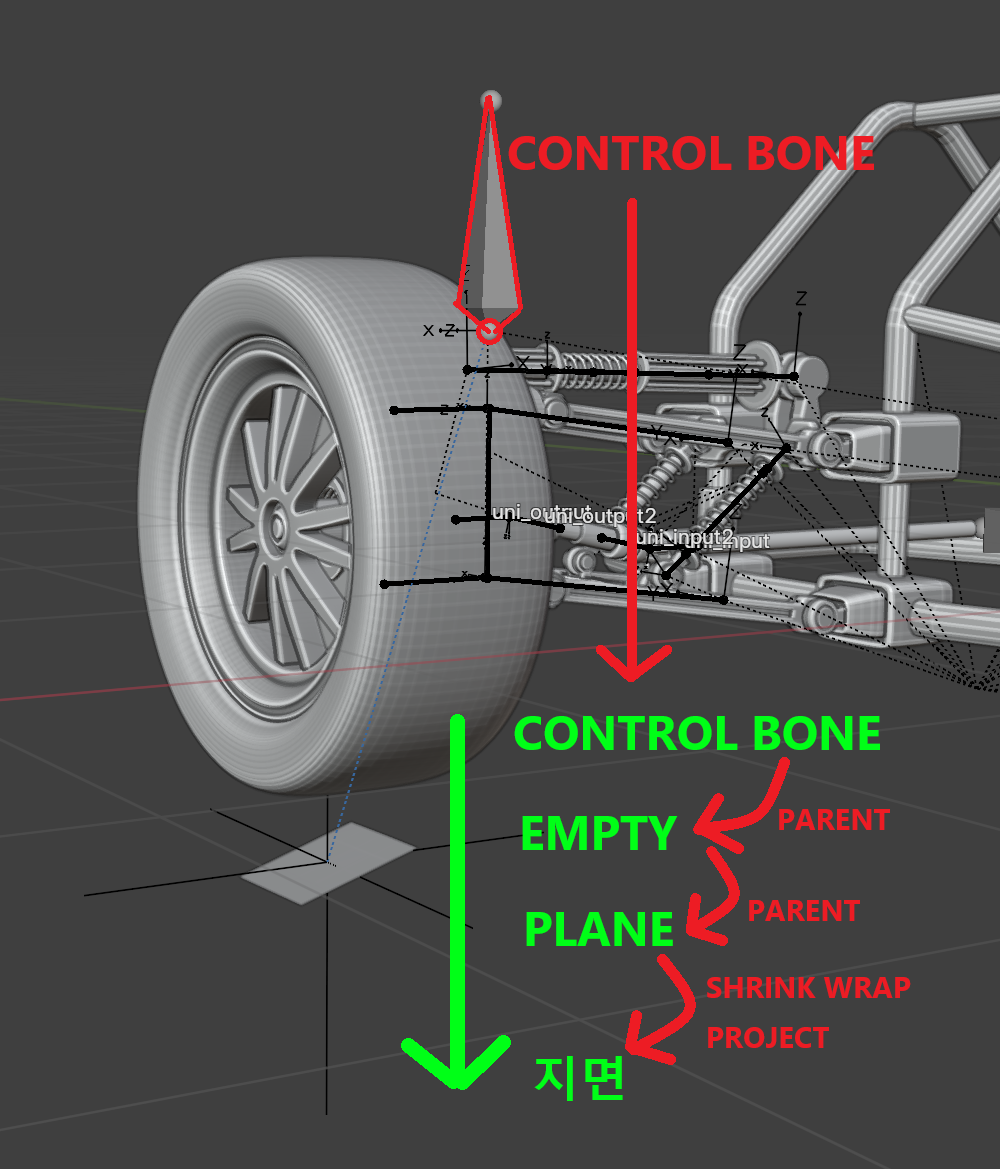
주행 시뮬레이션
1.Displace된 평면 준비 >> 차량 또는 plane에 움직임 키프레임
2.바퀴 아래쪽에 PLANE생성 >> Displace Plane에 ShrinkWrap(Project__Positive&Negative)
3.PLANE의 중심을 따라다니는 EMPTY 생성(Child Of Constraint__ Limited on Z Location )
4.각 서스펜션의 Control Bone과 Empty의 Z움직임 연동(Child Of Constrint__Limited on Z Location)


'Blender > Mechanical Rigging' 카테고리의 다른 글
| [블렌더] 90도 로봇팔 메커니즘 Mechanical Rigging_002 (0) | 2026.03.07 |
|---|---|
| [블렌더] 제트엔진 노즐 리깅 / 가변노즐 / 제트엔진 배기가스 텍스처 (0) | 2026.03.05 |
| [블렌더] StrandBeest 걷는 로봇 리깅 (0) | 2026.03.04 |
| [블렌더] 로봇 다리 리깅 Mechanical Rigging_001 (0) | 2026.03.03 |
| [블렌더] 리깅 스페이스 World / Pose / Custom / Local Space Constraint Spaces (0) | 2026.03.03 |