[블렌더] 90도 로봇팔 메커니즘 Mechanical Rigging_002
SMALL
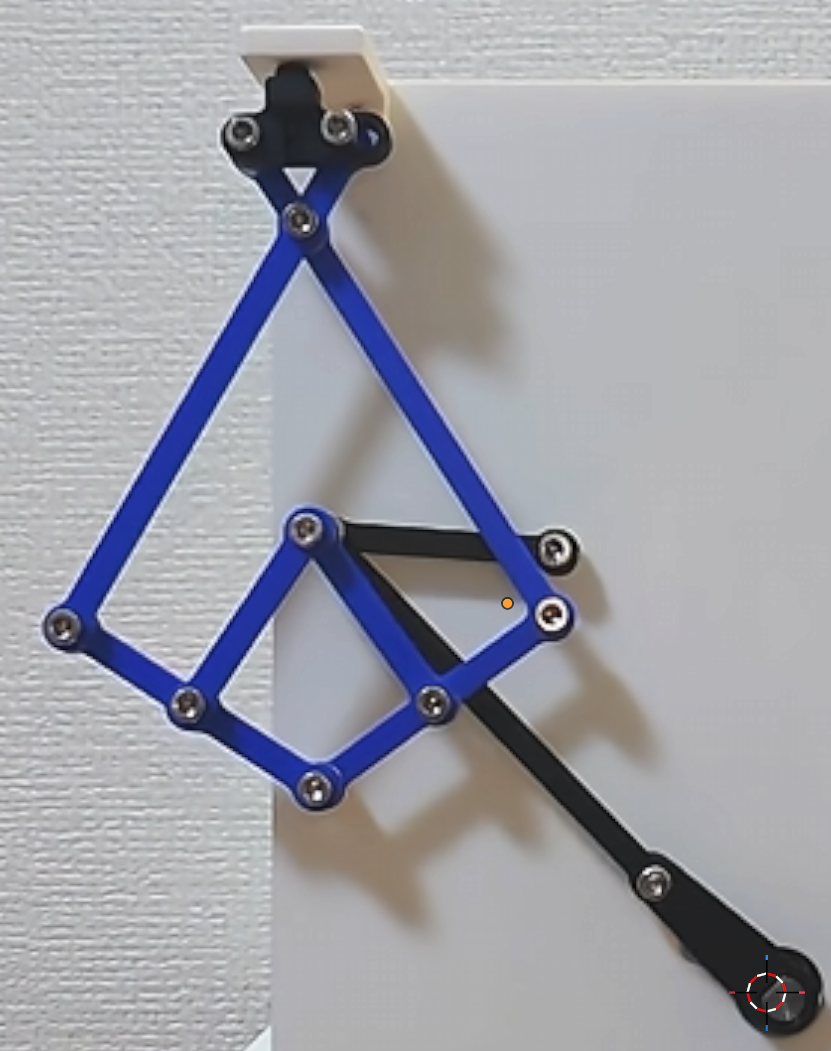
개요
Root의 회전운동 >> 접점부의 90도 운동 변환
리깅 구조
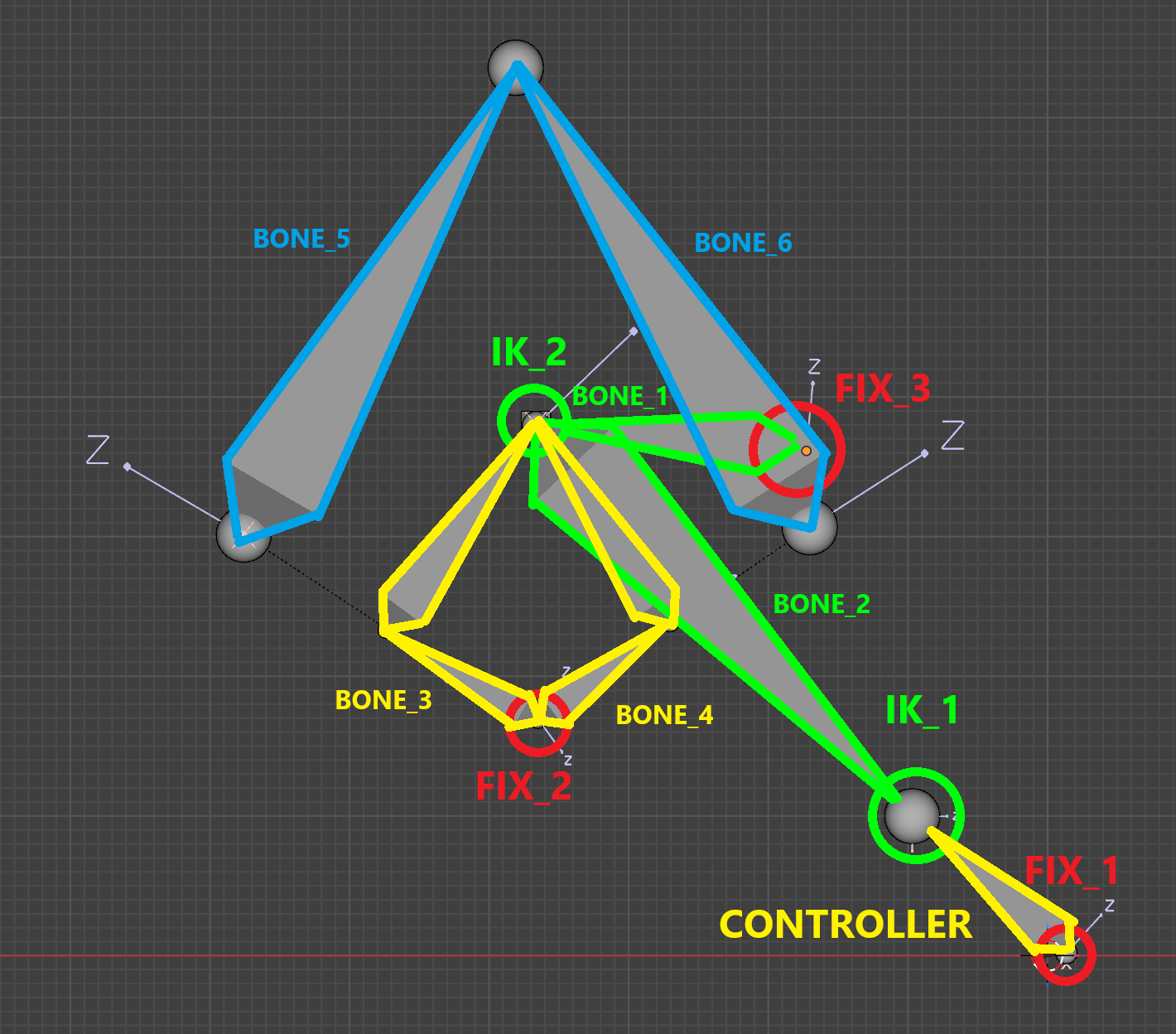
1. 컨트롤러 BONE : 회전운동, TIP에 IK1 BONE
2. CHAIN 1 : 고정점 3(FIX 3)에서 시작해서 BONE_1 >> BONE_2를 타고 IK1에 의해 조절
3. CHAIN 2 : BONE_3과 BONE_4각각 고정점2(FIX_2)에서 시작해서 IK2에 의해 조절
4. CHAIN 3 : BONE_5와 BONE_6은 각각 BONE_3과 BONE_4에 PARENT되어서 작동
BONE_5와 BONE_6은 서로에서 DAMPED TRACK되어 자세 유지
728x90
반응형
LIST
'Blender > Mechanical Rigging' 카테고리의 다른 글
| [블렌더] 제트엔진 노즐 리깅 / 가변노즐 / 제트엔진 배기가스 텍스처 (0) | 2026.03.05 |
|---|---|
| [블렌더] 자동차 서스펜션/스티어링 리깅 (0) | 2026.03.05 |
| [블렌더] StrandBeest 걷는 로봇 리깅 (0) | 2026.03.04 |
| [블렌더] 로봇 다리 리깅 Mechanical Rigging_001 (0) | 2026.03.03 |
| [블렌더] 리깅 스페이스 World / Pose / Custom / Local Space Constraint Spaces (0) | 2026.03.03 |